The first article dedicated to writing games for the classic Sega Genesis console in Motorola 68000 Assembler.
Let’s write the simplest endless loop for Sega. For this we need: an assembler, an emulator with a disassembler, a favorite text editor, a basic understanding of the structure of the Sega rom.
For development, I use my own Gen68KryBaby assembler/disassembler:
https://gitlab.com/demensdeum/gen68krybaby/
The tool is developed in Python 3, for assembly, a file with the extension .asm or .gen68KryBabyDisasm is supplied to the input, the output is a file with the extension .gen68KryBabyAsm.bin, which can be run in the emulator or on a real console (carefully, step away, the console may explode!)
Roms disassembling is also supported, for this you need to put a rom file to the input, without the .asm or .gen68KryBabyDisasm extensions. Opcode support will increase or decrease depending on my interest in the topic, the participation of contributors.
Structure
The Sega rom header occupies the first 512 bytes. It contains information about the game, name, supported peripherals, check sum, and other system flags. I suppose that without a title, the prefix will not even look at the rom, thinking that it is incorrect, like “what are you giving me here?”
After the header comes the Reset subroutine, from which the m68K processor starts its work. Well, it’s just a small matter – to find the opcodes, namely, the execution of nothing (!) And the transition to the subroutine at the address in memory. Googling, you can find the NOP opcode that does nothing and the JSR opcode that performs an unconditional jump to the argument address, that is, it just moves the carriage to where we ask for it, without any whims.
Putting It All Together
One of the games in the Beta version was the donor of the title for the rom, at the moment it is recorded in the form of hex data.
ROM HEADER:
00 ff 2b 52 00 00 02 00 00 00 49 90 00 00 49 90 00 00 49 90 00 ... etc. The program code so-but is a declaration of the Reset / EntryPoint subroutine in 512 (0x200) bytes, NOP, carriage return to 0x00000200, so we get an infinite loop.
Assembly code of Subroutine Reset / EntryPoint:
SUBROUTINE_EntryPoint:
NOP
NOP
NOP
NOP
NOP
JSR 0x00000200
Complete example along with rom title:
https://gitlab.com/demensdeum/segagenesissamples/-/blob/main/1InfiniteLoop/1infiniteloop.asm
Next, assembly:
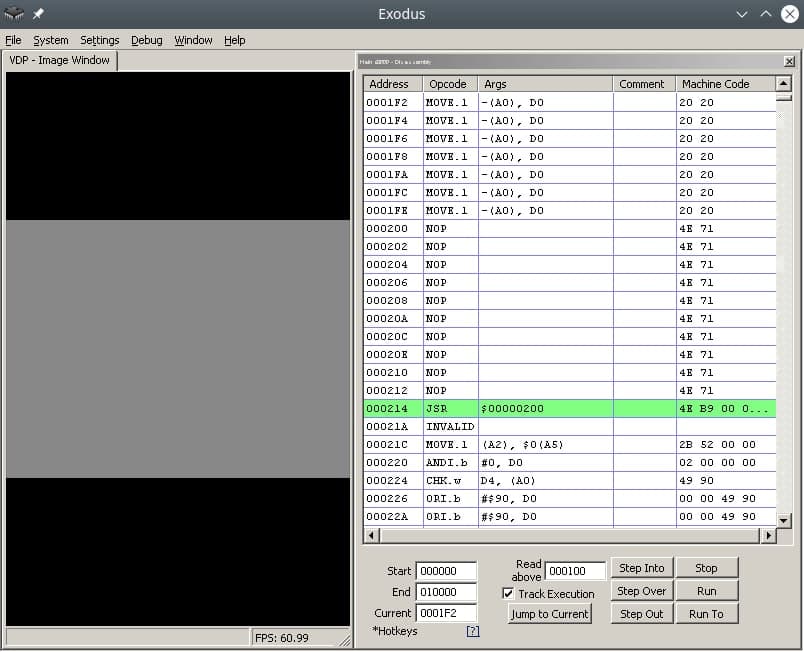
python3 gen68krybaby.py 1infiniteloop.asm Run rom 1infiniteloop.asm.gen68KryBabyAsm.bin in debugger mode of Exodus / Gens emulator, see that m68K correctly reads NOP, and endlessly jumps to EntryPoint at 0x200 on JSR
Sonic should be showing V here, but he left for Wacken .
Links
https://gitlab.com/demensdeum/gen68krybaby/
https://gitlab.com/demensdeum/segagenesissamples
https://www.exodusemulator.com/downloads/release-archive
Sources
ROM Hacking Demo – Genesis and SNES games in 480i < / p>
https://www.chibiakumas.com/68000/genesis.php
https://plutiedev.com/rom-header
https: //blog.bigevilcorporation.co.uk/2012/02/28/sega-megadrive-1-getting-started/
https : //opensource.apple.com/source/cctools/cctools-836/as/m68k-opcode.h.auto.html